Training Deep Neural Networks on a GPU



Importing Libraries
import torch
import torchvision
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
import torch.nn as nn
import torch.nn.functional as F
from torchvision.datasets import MNIST
from torchvision.transforms import ToTensor
from torchvision.utils import make_grid
from torch.utils.data.dataloader import DataLoader
from torch.utils.data import random_split
%matplotlib inline
matplotlib.rcParams['figure.facecolor'] = '#ffffff'
dataset = MNIST(root='data/', download=False, transform=ToTensor())
image, label = dataset[0]
image.permute(1, 2, 0).shape
image, label = dataset[0]
print('image.shape:', image.shape)
plt.imshow(image.permute(1, 2, 0), cmap='gray') # plt.imshow expects channels to be last dimension in an image tensor, so we use permute to reorder
print('label:', label)

len(dataset)
dataset[0]
image, label = dataset[143]
print('image.shape:', image.shape)
plt.imshow(image.permute(1, 2, 0), cmap='gray') # plt.imshow expects channels to be last dimension in an image tensor, so we use permute to reorder
print('label:', label)

val_size = 10000
train_size = len(dataset) - val_size
train_ds, val_ds = random_split(dataset, [train_size, val_size])
len(train_ds), len(val_ds)
batch_size = 128
train_loader = DataLoader(train_ds, batch_size, shuffle=True, num_workers=4, pin_memory=True)
val_loader = DataLoader(val_ds, batch_size*2, num_workers=4, pin_memory=True)
num_workers attribute tells the data loader instance how many sub-processes to use for data loading. By default, the num_workers value is set to zero, and a value of zero tells the loader to load the data inside the main process.
pin_memory (bool, optional) – If True, the data loader will copy tensors into CUDA pinned memory before returning them.
for images, _ in train_loader:
print('images.shape', images.shape)
print('grid.shape', make_grid(images, nrow=16).shape)
break
for images, _ in train_loader:
print('image.shape:', image.shape)
plt.figure(figsize=(16,8))
plt.axis('off')
plt.imshow(make_grid(images, nrow=16).permute((1, 2, 0)))
break

Hidden Layers, Activation function and Non-Linearity
for images, labels in train_loader:
print('images.shape', images.shape)
inputs = images.reshape(-1, 784)
print('inputs.shape', inputs.shape)
break
input_size = inputs.shape[-1]
#size of output from hidden layer is 32, can be inc or dec to change the learning capacity of model
hidden_size = 32
layer1 = nn.Linear(input_size, hidden_size ) # it will convert 784 to 32
inputs.shape
layer1_outputs = layer1(inputs)
print('layer1_outputs', layer1_outputs.shape)
layer1_outputs_direct = inputs @ layer1.weight.t() + layer1.bias
layer1_outputs_direct.shape
torch.allclose(layer1_outputs, layer1_outputs_direct, 1e-3)
Thus, layer1_outputs and inputs have a linear relationship, i.e., each element of layer_outputs is a weighted sum of elements from inputs. Thus, even as we train the model and modify the weights, layer1 can only capture linear relationships between inputs and outputs.

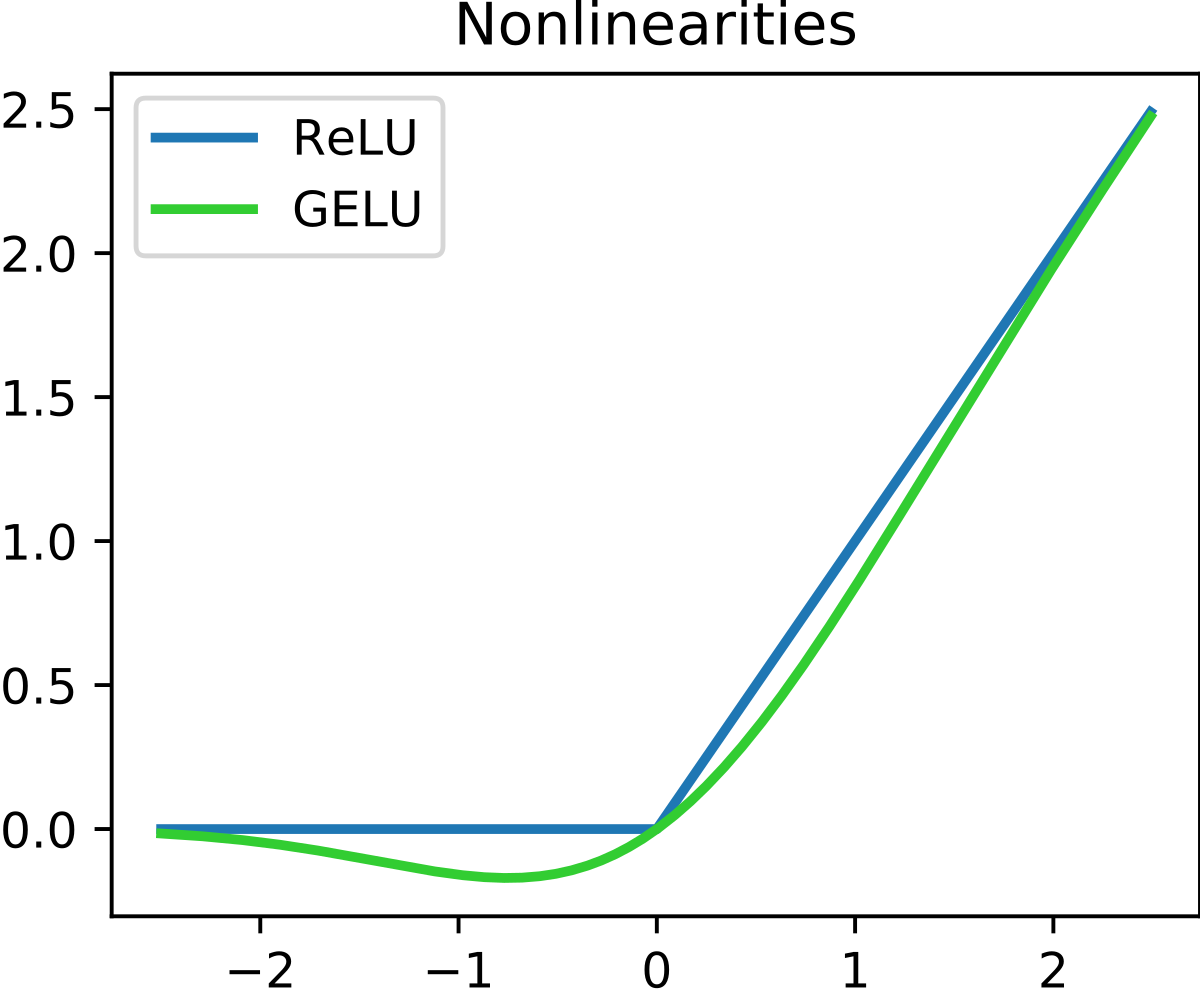
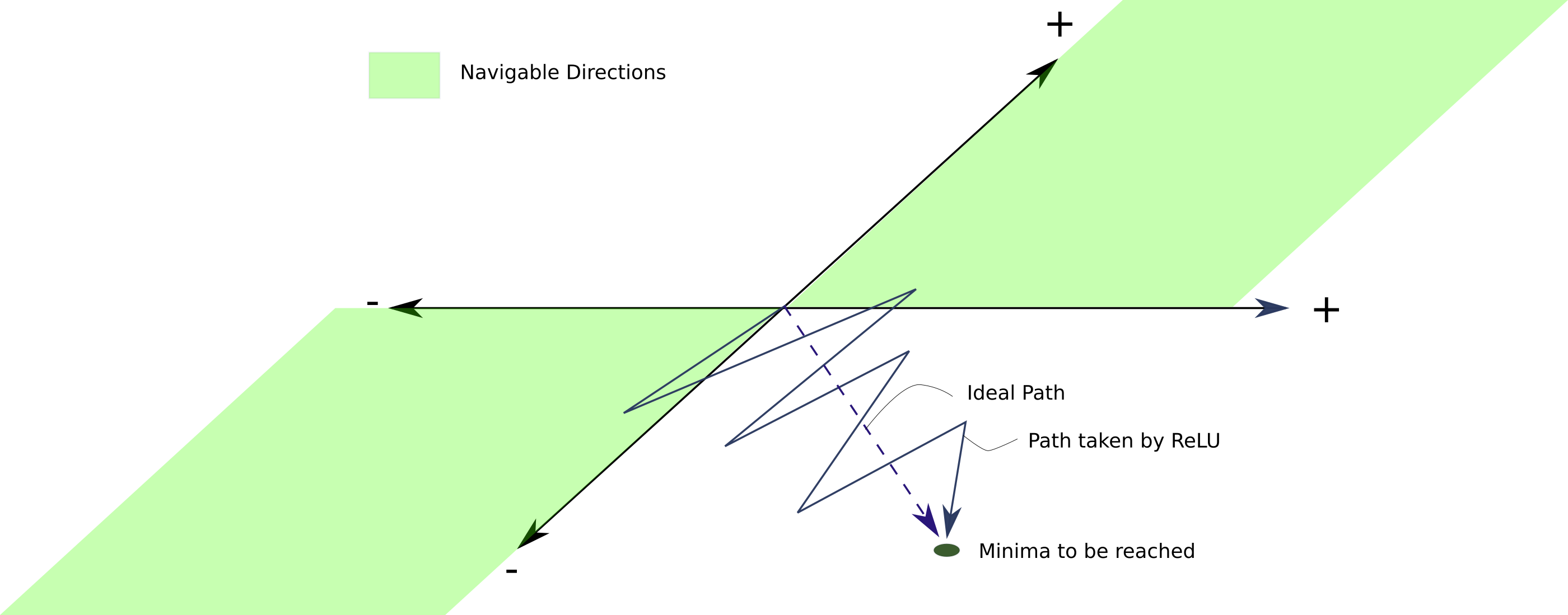
Next, we'll use the Rectified Linear Unit (ReLU) function as the activation function for the outputs. It has the formula relu(x) = max(0,x) i.e. it simply replaces negative values in a given tensor with the value 0. ReLU is a non-linear function
We can use the F.relu method to apply ReLU to the elements of a tensor.
F.relu(torch.tensor([[1, -1, 0],
[-0.1, .2, 3]]))
layer1_outputs.shape
relu_outputs = F.relu(layer1_outputs)
print('relu_outputs.shape:', relu_outputs.shape)
print('min(layer1_outputs):', torch.min(layer1_outputs).item())
print('min(relu_outputs):', torch.min(relu_outputs).item())
output_size = 10
layer2 = nn.Linear(hidden_size, output_size)
layer2_outputs = layer2(relu_outputs)
print('relu_outputs.shape:', relu_outputs.shape)
print('layer2_outputs.shape:', layer2_outputs.shape)
inputs.shape
F.cross_entropy(layer2_outputs, labels)
outputs = (F.relu(inputs @ layer1.weight.t() +layer1.bias)) @ layer2.weight.t() + layer2.bias
torch.allclose(outputs, layer2_outputs, 1e-3)
if we hadn't included a non-linear activation between the two linear layers, the final relationship b/w inputs and outputs would be Linear
outputs2 = (inputs @ layer1.weight.t() + layer1.bias) @ layer2.weight.t() + layer2.bias
combined_layer = nn.Linear(input_size, output_size)
combined_layer.weight.data = layer2.weight @ layer1.weight
combined_layer.bias.data = layer1.bias @ layer2.weight.t() + layer2.bias
outputs3 = inputs @ combined_layer.weight.t() + combined_layer.bias
torch.allclose(outputs2, outputs3, 1e-3)
Model
We are now ready to define our model. As discussed above, we'll create a neural network with one hidden layer. Here's what that means:
Instead of using a single
nn.Linearobject to transform a batch of inputs (pixel intensities) into outputs (class probabilities), we'll use twonn.Linearobjects. Each of these is called a layer in the network.The first layer (also known as the hidden layer) will transform the input matrix of shape
batch_size x 784into an intermediate output matrix of shapebatch_size x hidden_size. The parameterhidden_sizecan be configured manually (e.g., 32 or 64).We'll then apply a non-linear activation function to the intermediate outputs. The activation function transforms individual elements of the matrix.
The result of the activation function, which is also of size
batch_size x hidden_size, is passed into the second layer (also known as the output layer). The second layer transforms it into a matrix of sizebatch_size x 10. We can use this output to compute the loss and adjust weights using gradient descent.
As discussed above, our model will contain one hidden layer. Here's what it looks like visually:

Let's define the model by extending the nn.Module class from PyTorch.
class MnistModel(nn.Module):
def __init__(self, in_size, hidden_size, out_size):
super().__init__()
self.Linear1 = nn.Linear(in_size, hidden_size) # hidden layer
self.Linear2 = nn.Linear(hidden_size, out_size) # output layer
def forward(self, xb):
xb = xb.view(xb.size(0),-1) # flatten image tensor
out = self.Linear1(xb) # intermediate outputs using hidden layer
out = F.relu(out) # applying activation function
out = self.Linear2(out) # predictions using o/p layer
return out
def training_step(self, batch):
images, labels = batch
out = self(images)
loss = F.cross_entropy(out, labels)
return loss
def validation_step(self, batch):
images, labels = batch
out = self(images)
loss = F.cross_entropy(out, labels)
acc = accuracy(out, labels)
return {'val_loss': loss, 'val_acc': acc}
def validation_epoch_end(self, outputs):
batch_loss = [x['val_loss'] for x in outputs]
epoch_loss = torch.stack(batch_loss).mean() # Combine losses
batch_accs = [x['val_acc'] for x in outputs]
epoch_acc = torch.stack(batch_accs).mean() # combine accuracies
return {'val_loss': epoch_loss.item(), 'val_acc': epoch_acc.item()}
def epoch_end(self, epoch, result):
print("Epoch [{}], val_loss: {:4f}, val_acc: {:4f}".format(epoch, result['val_loss'], result['val_acc']))
def accuracy(outputs, labels):
_, preds = torch.max(outputs, dim=1)
return torch.tensor(torch.sum(preds == labels).item() / len(preds))
input_size = 784
hidden_size = 32
num_classes = 10
model = MnistModel(input_size, hidden_size, out_size = num_classes)
for t in model.parameters(): # weights and bias for linear layer and hidden layer
print(t.shape)
for images, labels in train_loader:
outputs = model(images)
break
loss = F.cross_entropy(outputs, labels)
print('Loss:', loss.item())
print('outputs.shape: ', outputs.shape)
print('Sample outputs :', outputs[:2].data)
torch.cuda.is_available()
def get_default_device():
if torch.cuda.is_available():
return torch.device('cuda')
else:
return torch.device('cpu')
device = get_default_device()
device
def to_device(data, device):
"""MOve tensors to chosen device"""
if isinstance(data, (list,tuple)):
return [to_device(x, device) for x in data]
return data.to(device, non_blocking = True) # to method
for images, labels in train_loader:
print(images.shape)
print(images.device)
images = to_device(images, device)
print(images.device)
break
DeviceDataLeader class to wrap our existing data loaders and move batches of data to the selected device, iter method to retrieve batches of data and an len to get number of batches
class DeviceDataLoader():
# wrap a dataloader to move data to device
def __init__(self, dl , device):
self.dl = dl
self.device = device
# yield a batch of data after moving it to device
def __iter__(self):
for b in self.dl:
yield to_device(b, self.device)
# number of batches
def __len__(self):
return len(self.dl)
# example
def some_numbers():
yield 10
yield 20
yield 30
for value in some_numbers():
print(value)
train_loader = DeviceDataLoader(train_loader, device)
val_loader = DeviceDataLoader(val_loader, device)
for xb, yb in val_loader:
print('xb.device:', xb.device)
print('yb:', yb)
break
Training part
def evaluate(model, val_loader):
outputs = [model.validation_step(batch) for batch in val_loader]
return model.validation_epoch_end(outputs)
def fit(epochs, lr, model, train_loader, val_loader, opt_func = torch.optim.SGD):
history = []
optimizer = opt_func(model.parameters(), lr)
for epoch in range(epochs):
#training phase
for batch in train_loader:
loss = model.training_step(batch)
loss.backward()
optimizer.step()
optimizer.zero_grad()
#validation phase
result = evaluate(model, val_loader)
model.epoch_end(epoch, result)
history.append(result)
return history
model = MnistModel(input_size, hidden_size= hidden_size, out_size=num_classes)
to_device(model, device)
history = [evaluate(model, val_loader)]
history
history += fit(5, 0.5, model, train_loader, val_loader)
try with more less lr
history += fit(5, 0.1, model, train_loader, val_loader)
losses = [x['val_loss'] for x in history]
plt.plot(losses, '-x')
plt.xlabel('epoch')
plt.ylabel('loss')
plt.title('Loss v/s Epochs')

accuracies = [x['val_acc'] for x in history]
plt.plot(accuracies, '-x')
plt.xlabel('epochs')
plt.ylabel('accuracies')
plt.title('Accuracies v/s Epochs')

test_dataset = MNIST(root='data/',
train=False,
transform=ToTensor())
def predict_image(img, model):
xb = to_device(img.unsqueeze(0), device)
print(xb.device)
yb = model(xb)
_, preds = torch.max(yb, dim=1)
return preds[0].item()
img, label = test_dataset[0]
plt.imshow(img[0], cmap='gray')
print('Label:', label, 'Prediction:', predict_image(img, model))

img, label = test_dataset[123]
plt.imshow(img[0], cmap='gray')
print('Label:', label, 'Prediction:', predict_image(img, model))

img, label = test_dataset[183]
plt.imshow(img[0], cmap='gray')
print('Label:', label, 'Prediction:', predict_image(img, model))

test_loader = DeviceDataLoader(DataLoader(test_dataset, batch_size=256), device)
result = evaluate(model, test_loader)
result
torch.save(model.state_dict(), 'mnist-feedforward.pth')