Simple Gan Implementation
Simple Gan Implementation
Paper : https://arxiv.org/pdf/1406.2661.pdf
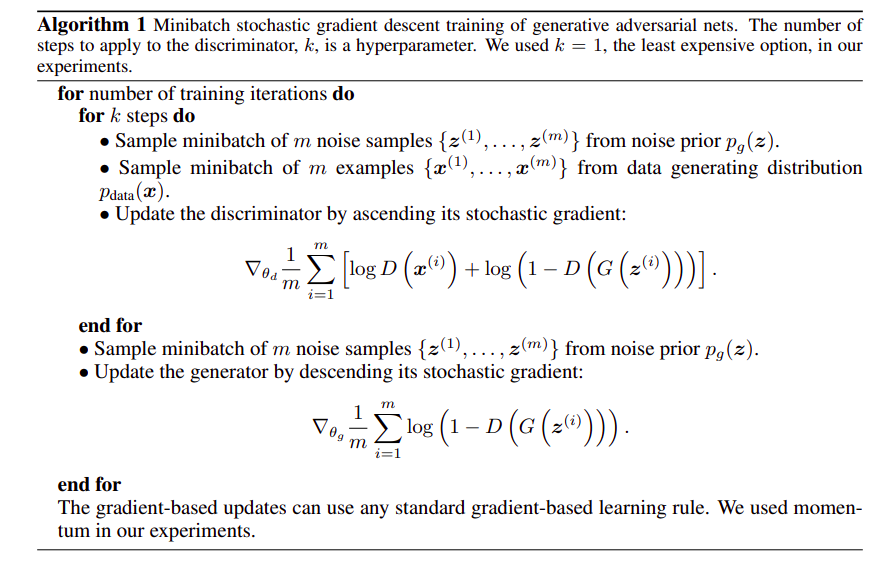
| # -*- coding: utf-8 -*- """ Created on Thu Jun 16:11:54 2021 @author: siddy """ import torch import torch.nn as nn import torch.optim as optim import torchvision import torchvision.datasets as datasets from torch.utils.data import DataLoader import torchvision.transforms as transforms from torch.utils.tensorboard import SummaryWriter # to print to tensorboard class Discriminator(nn.Module): def __init__(self, in_features): super().__init__() self.disc = nn.Sequential( nn.Linear(in_features, 128), nn.LeakyReLU(0.01), nn.Linear(128, 1), nn.Sigmoid(), ) def forward(self, x): return self.disc(x) class Generator(nn.Module): def __init__(self, z_dim, img_dim): super().__init__() self.gen = nn.Sequential( nn.Linear(z_dim, 256), nn.LeakyReLU(0.01), nn.Linear(256, img_dim), nn.Tanh(), # normalize inputs to [-1, 1] so make outputs [-1, 1] ) def forward(self, x): return self.gen(x) # Hyperparameters etc. device = "cuda" if torch.cuda.is_available() else "cpu" lr = 3e-4 z_dim = 64 image_dim = 28 * 28 * 1 # 784 batch_size = 32 num_epochs = 50 disc = Discriminator(image_dim).to(device) gen = Generator(z_dim, image_dim).to(device) fixed_noise = torch.randn((batch_size, z_dim)).to(device) transforms = transforms.Compose( [transforms.ToTensor(), transforms.Normalize((0.5,), (0.5,)),] ) dataset = datasets.MNIST(root="dataset/", transform=transforms, download=False) loader = DataLoader(dataset, batch_size=batch_size, shuffle=True) opt_disc = optim.Adam(disc.parameters(), lr=lr) opt_gen = optim.Adam(gen.parameters(), lr=lr) criterion = nn.BCELoss() writer_fake = SummaryWriter(f"logs/fake") writer_real = SummaryWriter(f"logs/real") step = 0 for epoch in range(num_epochs): for batch_idx, (real, _) in enumerate(loader): real = real.view(-1, 784).to(device) batch_size = real.shape[0] ### Train Discriminator: max log(D(x)) + log(1 - D(G(z))) noise = torch.randn(batch_size, z_dim).to(device) fake = gen(noise) disc_real = disc(real).view(-1) lossD_real = criterion(disc_real, torch.ones_like(disc_real)) disc_fake = disc(fake).view(-1) lossD_fake = criterion(disc_fake, torch.zeros_like(disc_fake)) lossD = (lossD_real + lossD_fake) / 2 disc.zero_grad() lossD.backward(retain_graph=True) opt_disc.step() ### Train Generator: min log(1 - D(G(z))) <-> max log(D(G(z)) # where the second option of maximizing doesn't suffer from # saturating gradients output = disc(fake).view(-1) lossG = criterion(output, torch.ones_like(output)) gen.zero_grad() lossG.backward() opt_gen.step() if batch_idx == 0: print( f"Epoch [{epoch}/{num_epochs}] Batch {batch_idx}/{len(loader)} \ Loss D: {lossD:.4f}, loss G: {lossG:.4f}" ) with torch.no_grad(): fake = gen(fixed_noise).reshape(-1, 1, 28, 28) data = real.reshape(-1, 1, 28, 28) img_grid_fake = torchvision.utils.make_grid(fake, normalize=True) img_grid_real = torchvision.utils.make_grid(data, normalize=True) writer_fake.add_image( "Mnist Fake Images", img_grid_fake, global_step=step ) writer_real.add_image( "Mnist Real Images", img_grid_real, global_step=step ) step += 1 |